Workspace For Human-Robot Collaboration
The human-robot team is moving the workpieces from one side of the table to the other while maintaining the same configuration.
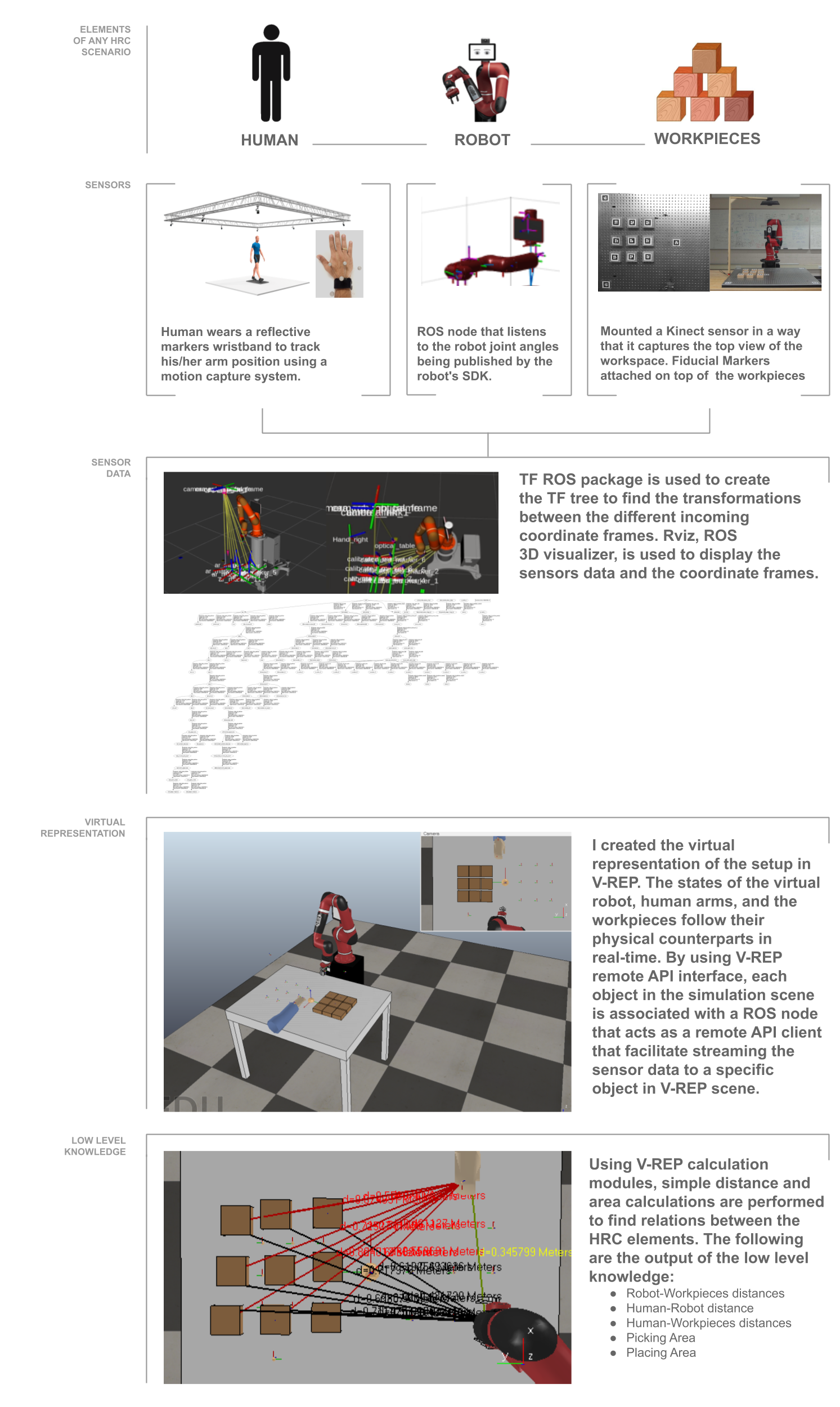
Along with the physical work cell, I created a virtual representation of the setup that can run offline or online. The offline virtual representation allows me to perform pre-interaction analysis for testing and validating the algorithms I am developing. The online virtual representation lets me view what the robot is seeing, thinking, and doing. At this stage, I am utilizing the online virtual representation for debugging. I am exploring other potential use cases that can enhance the human-robot collaboration inspired by the concept of the Digital Twin.
How I built it
Software:
- Robot Operating System (ROS).
- Virtual Robot Experimentation Platform (V-REP).
Sensors:
- RGB-D Kinect sensor.
- Optitrack Motion Capture system.
Robot: Sawyer by Rethink Robotics.
How it works